|
フライトログメニューに表示される情報について説明します。
【#1 Summary】
Speed Avg: 平均対地速度 [km/h]
Speed Max: 最大対地速度 [km/h]
Lift Max: 最大上昇率 [m/s]
Sink Max: 最大下降率 [m/s]
Alt. Max: 最高高度 [m]
Accel. Max: 最高加速度 [G]
Accel. Min: 最小加速度 [G]
【#2 Distance】
Trip meter: フライトログ集計開始からの累積移動距離 [m]
Sect meter: 前パイロンからの累積移動距離 [m]
Total gain: 累積獲得高度 [m]
【#3 Motion statistics】
Pitching: ピッチング回数 [回] (センタリング中を除く)
C-Pitching: ピッチング回数 [回] (センタリング中)
Rolling: ローリング回数 [回]
Centering: センタリング回転回数 [周]
Spiral: スパイラル回転回数 [周]
Stall: ストール時間 [秒]
【#4 Status statistics】
Straight: 直進時間 [秒]
Left turn: 左旋回時間 [秒]
Right turn: 右旋回時間 [秒]
H Stop: (水平方向)停止時間 [秒]
Pre flight: ウェイティング時間 [秒]
【#5 Duration】
Takeoff time: テイクオフ時刻
Flight time: テイクオフから現在までの経過時間 [秒]
Boot time: ナビ電源オンから現在までの動作時間 [秒]
Resume time: ナビ電源リジュームから現在までの動作時間 [秒]
【#6 Soaring statistics summary】
Lift: 上昇時間 [秒]
LvKeep: 水平飛行時間 [秒]
Sink: 下降時間 [秒]
LvKeepのレンジはデフォルトで±0.1m/sに設定されています。レンジは
[コンフィグ]-[アシスト]-[パラメータ2]-[Level Keep]から変更できます。
【#7 Soaring statistics: (Lift)】
Centering: センタリングによる上昇時間 [秒]、比率 [%]
Turn: 旋回による上昇時間 [秒]、比率 [%]
Straight: 直線飛行時による上昇時間 [秒]、比率 [%]
H Stop: 垂直上昇時間[秒]、比率 [%]
Total: 上昇時間の合計 [秒]
【#8 Soaring statistics: (LvKeep)】
Centering: センタリングによる水平飛行時間 [秒]、比率 [%]
Turn: 旋回による水平飛行時間 [秒]、比率 [%]
Straight: 直線飛行時による水平飛行時間 [秒]、比率 [%]
H Stop: 停止時間[秒]、比率 [%]
Total: 水平飛行時間時間の合計 [秒]
【#9 Soaring statistics: (Sink)】
Centering: センタリングによる下降時間 [秒]、比率 [%]
Turn: 旋回による下降時間 [秒]、比率 [%]
Straight: 直線飛行時による下降時間 [秒]、比率 [%]
H Stop: 垂直下降時間 [秒]、比率 [%]
Total: 下降時間の合計 [秒]
【#10 Soaring statistics: (Gain)】
Centering: センタリングによる獲得高度 [m]、比率 [%]
Turn: 旋回による獲得高度 [m]、比率 [%]
Straight: 直線飛行時による獲得高度 [m]、比率 [%]
H Stop: 垂直上昇による獲得高度 [m]、比率 [%]
Total: 獲得高度の合計 [m]
【#11 Soaring statistics: (Loss)】
Centering: センタリングによる損失高度 [m]、比率 [%]
Turn: 旋回による損失高度 [m]、比率 [%]
Straight: 直線飛行時による損失高度 [m]、比率 [%]
H Stop: 垂直上昇による損失高度 [m]、比率 [%]
Total: 損失高度の合計 [m]
【#12 Soaring statistics: (Vario)】
Centering: センタリング時の平均上昇率 [m/s]
Turn: 旋回時の平均上昇率 [m/s]
Straight: 直線飛行時の平均上昇率 [m/s]
H Stop: 水平停止時の平均上昇率 [m/s]
Total: 平均上昇率 [m/s]
【#13 Centering statistics】
Time: センタリング時間 [秒]
Balance: 左/右センタリングの時間比率 [%]
Count: センタリング回数 [回]
Turn: センタリング旋回数 [周]

(#13~#16のCentering statisticsでは、左右のセンタリングごとにログを分けて表示します。)
【#14 Centering statistics :(Vario)】
vMax: 最大上昇率 [m/s]
vMin: 最大下降率 [m/s]
vAvg: 平均上昇率 [m/s]
Gain: 累積獲得高度 [m]
Loss: 累積損失高度 [m]
【#15 Centering statistics :(Power)】
Spd.: 平均速度 [km/h]
Max: 最大速度 [km/h]
Gr.: 平均加速度 [G]
Max: 最大加速度 [G]
【#16 Centering statistics :(etc)】
RPM: 平均回転速度 [周/分]
r.: 平均センタリング半径 [m]
Dr/C: 1センタリングの平均継続時間 [秒]
Tr/C: 1センタリングの平均旋回回数 [周]
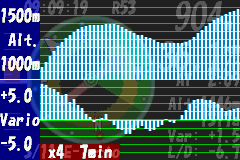
【#17 Alt. histogram】
高度ヒストグラム(50分割)
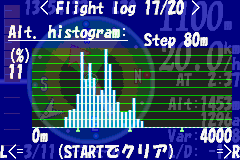
(#17~#20のヒストグラムの表示レンジはデータに応じて自動調整されます。)
【#18 Vario. histogram】
バリオヒストグラム(25分割x2)
【#19 Speed histogram】
速度ヒストグラム(50分割)
【#20 Direction histogram】
進行方位ヒストグラム(24分割)
|